
A few developers have seated their humanoid robots on wheeled bases, which completely bypasses those troublesome hips, knees, ankles, and feet, along with the weight-bearing, balance-assist wonder part, the pesky heel of the foot, which continues to bedevil all manner of engineers and orthopedic researchers on just exactly how it works its wonders.
The wheel, arguably civilization’s greatest invention, offers its humanoid riders speed, solid balance, greater work productivity, fewer parts used in manufacture, cheaper to build, longer battery life, and far less of a headache to maintain (compared to the aforementioned hips, knees, ankles, feet—and let us not forget that remarkable heel).
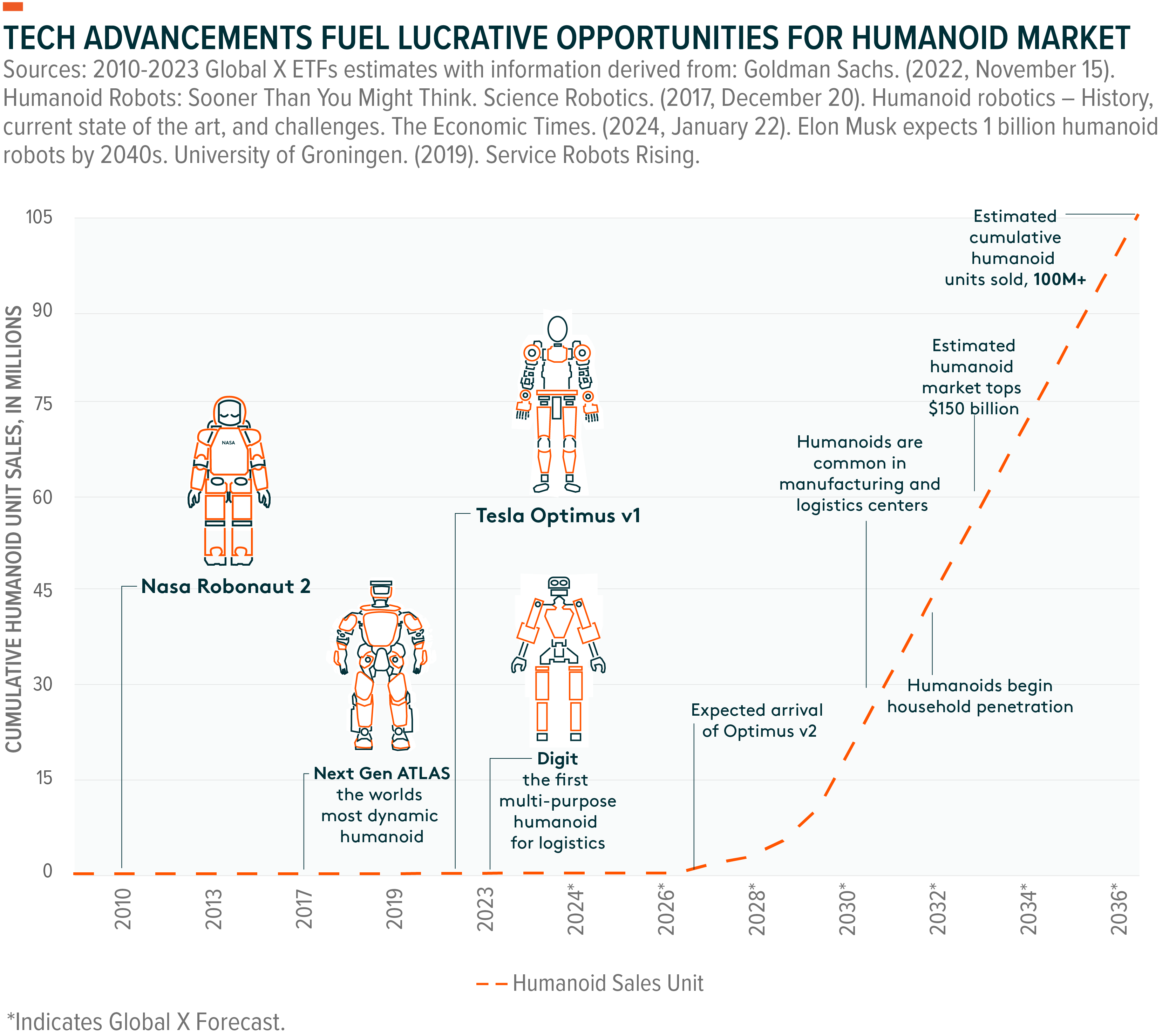
Reason enough for all of the humanoid robot interest and activity is the future forecasts about them. According to recent research from Goldman Sachs, “the total addressable market for humanoid robots is projected to reach $38 billion by 2035, up more than sixfold from a previous projection of $6 billion [from just one year ago], Goldman Sachs Research analyst Jacqueline Du, head of China Industrial Technology research, writes in the report. Their estimate for robot shipments increased fourfold, to 1.4 million units, over the same time frame, with a much faster path to profitability on a 40% reduction in the cost of materials.
$38 billion by 2035, up from a previous $6 billion, is most likely the driving force behind all of the mind-boggling investments pouring into the sector.
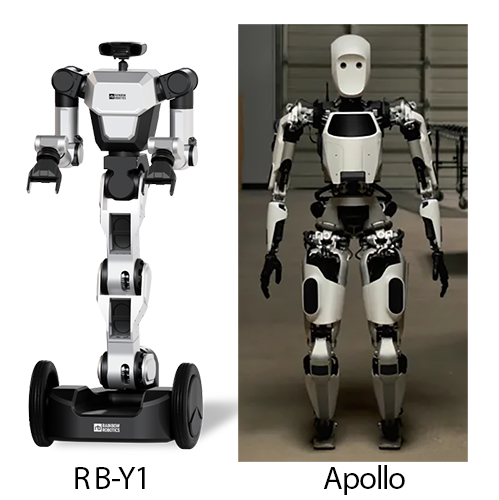
Watching this side-by-side comparison from AI News of humanoid feet vs. humanoid wheels at a Mercedes factory shows why humankind puts wheels on most everything it touches (See: Apptronik (USA) bi-pedal Apollo vs. Rainbow Robotics (Korea) wheeled RB-Y1)
There is a specious argument afoot for humanoids with feet that reasons bi-pedals are especially the robot of choice for reason of their adaptability to environments designed for humans like stairs, uneven surfaces, and obstacles. “Bi-pedal robots are naturally suited to move through these spaces in ways that wheeled robots find challenging.”
It’s totally true, except that factories and warehouses are, in most cases, scrupulously flat with plenty of space for robot locomotion. There are no fallen trees, grassy knolls, thick vegetation, water hazards or sand traps in factories and warehouses. Insurance policies and the government’s Occupational Safety and Health Administration (OSHA) have long ago seen to tidiness in the manufacturing and logistics spaces. Disregarding dangerous workplaces means both hefty fines and being uninsurable. As a result, humanoids with feet have no special advantage over their wheeled brethren. Rather, it seems obvious that things are the other way around: wheeled humanoids are nearly three times faster, displace weight better over their platform of wheels, and have remarkable dexterity and quickness with their hands and arms.
What makers of bi-pedal humanoids are up against is quite formidable. Antonia Malchik writing in PopSci sums it up well: “When we walk, our ankles and knees work to balance the body’s weight over a single foot, allowing the other to release and swing forward. Just before that leg’s foot leaves the ground, its knee bends and elastic energy that was stored in the ankle tendons releases. The combination of elastic energy, pivoting, and lifting is what allows humans to walk using comparatively little energy, but the process is complicated. It seems to lean significantly on the brain in ways we’re only beginning to fathom, and has so far been almost impossible to replicate with precision.”
It’s actually difficult not to have a bias in favor of wheeled robots when watching the two humanoids at work (again, watch the video of Apollo vs. RB-Y1).
Then too, there’s the financial consideration of not investing in the expense of making a humanoid stand and move on two feet rather than wheels. Savings gained in using wheels could mean more and better mechatronics, sensors, or AI.
The crafty Germans are simultaneously trialing both at Mercedes plants. Their factories and assembly plants desperately need workers, so Mercedes is hoping that one or the other or both work out for them. Interesting would be to get ahold of Mercedes’ results from the trials.
Geographically, continues Du’s report, no one country or region appears to be completely dominant in this emerging sector. Some Western companies likely have the most sophisticated AI software models, while Asia will probably be the manufacturing hub for humanoid components, because of the wide supply chain base and lower manufacturing costs.
The title of the Goldman Sachs’ research report from Du’s team is interesting: Global Automation Humanoid Robot: The AI Accelerant. That “AI Accelerant” bit is eye-opening in that it shows the primacy of converging GenAI with humanoids rather than perfecting bi-pedal locomotion. In short, GenAI and wheeled humanoids seem to have the edge, which Korea’s Rainbow Robotics is doing with successors to RB-Y1 and China’s Pudu Robotics is doing with its D7.
Here’s what the literature is saying about both competitors in the humanoid robot space. In the near future, maybe we can ask GenAI to decisively resolve which is best: feet or wheels. For now, you be the judge.
Advantages of Bi-Pedal Robots
- Adaptability to Human Environments
One of the biggest advantages of bi-pedal robots is their adaptability to environments designed for humans. The world we live in, from our homes to workplaces, is full of stairs, doorways, uneven surfaces, and obstacles. Bi-pedal robots are naturally suited to move through these spaces in ways that wheeled robots find challenging. Stairs, for example, pose no problem to a bi-pedal robot that can climb, making it possible for them to be used in multi-level buildings without additional infrastructure. - Enhanced Mobility in Varied Terrains
Bi-pedal robots can navigate terrains that are difficult or impossible for wheeled robots to cross, such as rocky surfaces, narrow pathways, or areas cluttered with debris. This capability is particularly important for applications like search and rescue missions, where the environment may be unpredictable and full of obstacles that require versatile movement capabilities. - Human-Like Interaction
Bi-pedal robots also have the advantage of human-like interaction. When it comes to collaborative robots (cobots), the ability to move like a human allows the robot to interact more effectively with people. For instance, a robot with a humanoid gait can work in spaces designed for human movement and even perform tasks like operating machinery or carrying items, thereby creating a more seamless human-robot relationship. - Balance and Stability Research
Building bi-pedal robots has driven advances in research related to balance and control. These robots can potentially learn how to adjust their center of gravity and redistribute their weight to remain stable, even when pushed or when they encounter unexpected obstacles. The development of bi-pedal locomotion has led to significant advancements in fields like control theory, artificial intelligence, and biomechanics, further benefiting robotics as a whole.
Disadvantages of Bi-Pedal Robots
- Energy Inefficiency
One of the major drawbacks of bi-pedal robots is their energy inefficiency. Walking on two legs is inherently less efficient than rolling on wheels. Maintaining balance, lifting one leg while supporting the body on the other, and adjusting to uneven terrain all require substantial energy. This limitation makes bi-pedal robots less suitable for applications where energy conservation is crucial. - Complexity and Cost
Developing bi-pedal robots requires advanced technology to replicate human-like balance and gait, which makes them more complex and costly compared to wheeled robots. The need for multiple sensors, complex algorithms, and actuators for controlling leg movements adds significantly to the cost of production and maintenance. - Balance Challenges
Maintaining balance is a challenging problem for bi-pedal robots, especially when dealing with dynamic situations. For instance, sudden changes in the terrain, unexpected pushes, or rapid turns can cause a bi-pedal robot to lose balance and fall, leading to potential damage or the need for recalibration. Designing effective stabilization systems adds to the complexity and cost of bi-pedal robots.
Advantages of Wheeled Robots
- Energy Efficiency
Wheeled robots are much more energy-efficient than their bi-pedal counterparts. The rolling motion of wheels minimizes friction and requires far less energy to maintain speed and direction. This energy efficiency is critical in situations where power is limited, such as in long-duration tasks or when the robot is operating on battery power. - Simplicity and Cost-Effectiveness
Wheeled robots are inherently simpler in their design, requiring fewer moving parts compared to bi-pedal robots. This simplicity makes them easier and less expensive to design, manufacture, and maintain. Additionally, fewer sensors are needed for balancing and locomotion, reducing both hardware and software complexity. - Speed and Stability
On flat surfaces, wheeled robots have a distinct advantage in terms of speed and stability. They can move much faster than bi-pedal robots, making them ideal for tasks where quick movement is necessary. Since wheels provide a stable platform, these robots are less likely to fall or lose balance, reducing the chances of damage during operation. - Carrying Capacity
Due to their stable design, wheeled robots are often able to carry heavier loads compared to bi-pedal robots of similar size. This capability makes them suitable for applications such as transporting goods in warehouses, delivering packages, or carrying equipment in factories.
Disadvantages of Wheeled Robots
- Limited Terrain Capabilities
One of the major disadvantages of wheeled robots is their inability to navigate certain types of terrain. Stairs, uneven surfaces, obstacles, and narrow pathways are all challenging for wheeled robots. These limitations restrict their use to areas with relatively flat and even surfaces, which may not always be available, particularly in outdoor or emergency environments. - Dependence on Flat Surfaces
Wheeled robots are highly dependent on flat surfaces to function effectively. In environments with obstacles, such as construction sites, disaster zones, or rural areas, wheeled robots may struggle or even become immobilized. In such cases, bi-pedal robots have the advantage of stepping over obstacles and navigating difficult terrain. - Incompatibility with Human Environments
While wheels are efficient on flat ground, human environments are not always designed for wheeled movement. Stairs, ladders, and uneven flooring are common features that can impede wheeled robots, making them less versatile in spaces where humans typically operate. This limitation affects their ability to work seamlessly in environments like homes, offices, or multi-level buildings.
Applications of Bi-Pedal and Wheeled Robots
The suitability of bi-pedal versus wheeled robots depends largely on the specific application. Understanding these applications helps clarify the advantages and disadvantages of each type of robot.
- Service and Personal Assistance:
In environments such as homes, hospitals, or care facilities, bi-pedal robots may have an advantage due to their ability to navigate spaces designed for human movement. They can open doors, climb stairs, and retrieve items from shelves—tasks that would be challenging for wheeled robots. - Warehouse and Factory Automation:
In controlled environments with flat surfaces, such as warehouses and factories, wheeled robots are preferred due to their efficiency, stability, and carrying capacity. These robots can move quickly along predefined paths, transport goods, and work for extended periods with minimal power consumption. - Search and Rescue:
In search and rescue missions, versatility is critical. Bi-pedal robots are better suited for navigating rubble, climbing over obstacles, and accessing hard-to-reach areas, making them valuable in emergency response scenarios. Wheeled robots may struggle in such environments due to terrain challenges. - Outdoor Exploration:
Wheeled robots are used extensively in outdoor exploration, particularly in agricultural and planetary exploration. For instance, Mars rovers are wheeled robots designed to traverse the rocky but mostly flat terrain of Mars. However, for rugged terrains or areas with significant obstacles, a bi-pedal design might be more practical, albeit more challenging to develop.

Conclusion
The debate between bi-pedal and wheeled robots is ultimately a matter of function over form. Bi-pedal robots, with their human-like movement, offer significant advantages in navigating environments designed for humans, interacting with people, and adapting to varied terrains. However, these benefits come at the cost of increased energy consumption, complexity, and the challenge of maintaining balance.
Wheeled robots, on the other hand, provide a more efficient, cost-effective solution for many practical applications, especially in controlled or flat environments. Their simplicity, speed, and stability make them the preferred choice for tasks such as transportation, warehousing, and routine service tasks on flat surfaces.
Ultimately, the choice between bi-pedal and wheeled locomotion depends on the intended application and the environment in which the robot will operate. In many cases, hybrid designs that combine elements of both approaches may offer the most versatile and effective solutions, providing the efficiency of wheels with the adaptability of legs when needed. As robotics technology continues to evolve, designers will increasingly be able to tailor robots to meet specific challenges, maximizing the benefits of both bi-pedal and wheeled locomotion in their respective domains.
.