

Hi Tom,
Nearly two years ago, we got inquiries from a number of warehouse and logistics robotics automation suppliers who were looking for better gripper technology.
We learned that the current designs did not meet their requirements and the general e-commerce companies where increasingly focusing on SKU handling as their next step in automation.
After investigating the dominating and most innovative current gripping designs and listening carefully to warehouse robotics system builders’ requirements we initiated an initial ideation process to generate potential concept designs that we believed to be able to significantly improve the ability to cope with the challenge.
We frame our benchmarking around 12 technical KPIs that would help to select the most promising concepts and benchmark them to state of the art current offerings.
Based on our inherited culture of design philosophy to apply bionic and self-compliance, we surprisingly fast ended a design that, in its core, has survived all the way to its final product design, as we now are bringing to market.
It’s based on a hybrid technology stack that both involves soft and hard kinematics, and has been optimized (topology, weight, range, impact forces and robustness, compliance etc.) and simplified in terms of both manufacturing complexity, maintenance and operation.
We kept working with a couple of these system suppliers to ensure a frequent review and expectation alignment throughout the whole design and development project, and still have a close dialog with them which we appreciate highly. All of this was conducted in a highly bootstrapped environment that ensured sharp focus and firm/frequent review and validation.
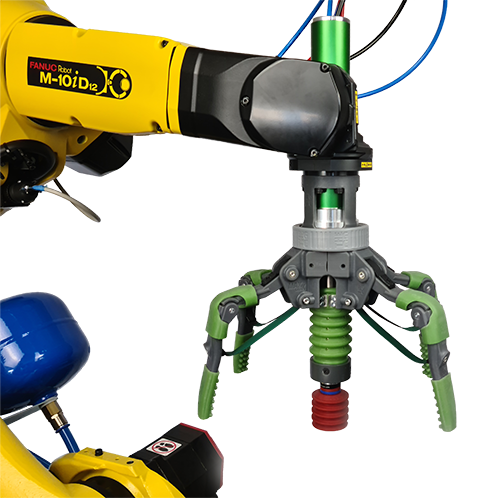
One of the key innovations by MAXXgrip X2 – with the telescopic cylinder – that is a proprietary part of our design—is the air-operated telescopic cylinder. Its elegance is that all air supply is fed from the top end, and it’s driven by both vacuum to extend the actuator/opening the finders and compressed air to retract and close the fingers. Another unique feature is that the finger is underactuated and driven by flexible pull-belts.
This hybrid kinematics and actuation design gives some quite extraordinary benefits.
The principle of conjoined vacuum and compressed air drive allows us to both extend and contract the piston from one side of the seal chamber inside the pistons. This reduces the complexity and weight significantly. This works well here since we always are opening the gripper without payload and vacuum works fine in our atmospheric environment here on earth.
You may note that the driving belts are linked to the actuation cylinder via a soft rubber like belly, this is another unique element that facilitates that the power transfer to the fingertips are damped so the interception impact forces equally are reduced, without losing any final clamping forces though.
Due to the kinematic structure and arrangement the fingers will withstand unintended impact with f.i. a tote wall or a neighboring object as they will softly bound upward during impact. This also serves to reduce damage risk due to normal operation.
I know this approach is off-the chart and against some of the high-tech trends form the first impression. But trust me we have intensively used top-level design tools like FEM and topology optimization, multi-physics, digital-twin simulation’s etc.
That should, to the best of my understanding of good engineering, not lead to super expensive and complex designs; quite the opposite.
Naturally, we have filed for patents, as we want to keep what is ours is ours, period!
And we know once its out there its quite say inspiring and tempting to build upon, as all its beauty are disclosed in it simplicity and intuitive to understand as its not that different from how “the bid engineer” could have design a similar species😊
The first concept demonstrations of the leading prototype design we were able to validate early summer 2021, and we were able to gain confidence that this invention would have the capability to have a big impact on the robotics industry’s ability to meet the general market requirement for mainstream adoption in a feasible way on all major KPIs.

So, we sat sail and went into open waters from there.
The next phase of industrialization was intensive application durability and capability testing. We keep on during these tests that we conduct internally, utilizing both the popular FANUC M-series arms and COBOTS. Both serve their own areas of performance requirements as the inhomogeneous application space in warehouse and logistics operations will need arm in both end of the spectra of robot arms.
Tests are also executed together with a set of pilot partners and we have plans ahead to keep on doing so for years to come before we believe we have been able to cover everything.
We have not today disclosed all configurations we have designed into the platform. We are to release a series of feature elements and configurations within the following weeks and months.
And we have a roadmap set for the next 24 months, where we will serve with new valuable features and add-ons, both from a hardware and software standpoint.
