
Smart robots: Journey to the smart factory
For a smart factory to be truly smart, there’s no question that it’s going to need smart robots that are a helluva lot brainier than the best of present-day factory robots (see Bloomberg video here). As the inexorable convergence of artificial intelligence (AI) with industrial robots takes hold over time, robots will get smarter, or perish.
The question then to answer is what sort of tech will make today’s less brainy robots masters of the smart factory? Over and over again, the technical literature and research papers in robotics consistently tell us that five breakthrough robot technologies are necessary to elevate factory robots into autonomous manufacturing systems capable of self-optimization, continuous learning, and seamless human collaboration.
The five: Dexterous Manipulation, Collaborative Intelligence, Real-Time Adaptive Learning, Quantum-Enhanced Computing, Learning from Demonstration (LfD).
Interestingly, the U.S., having shuttered its industrial robot developers in the 1980s, leads in all five of the technologies (dexterous manipulation shared with the UK) that are still needed to make the leap from robot to smart robot. The strange fallout from that being, America, if and when it makes these five breakthroughs happen, could re-ignite its industrial robot businesses. Fancy that!
The five, still unattained, are said to represent the frontier of robotics research, and that they have the potential to fundamentally reshape how robots operate in manufacturing environments.
- Fully Autonomous Dexterous Manipulation
The development of human-level dexterous manipulation remains one of robotics’ greatest challenges, embodying Moravec’s paradox where “the hard problems are easy, and the easy problems are hard”. Current industrial robots excel at repetitive, pre-programmed tasks but struggle with the nuanced manipulation capabilities that humans perform effortlessly.
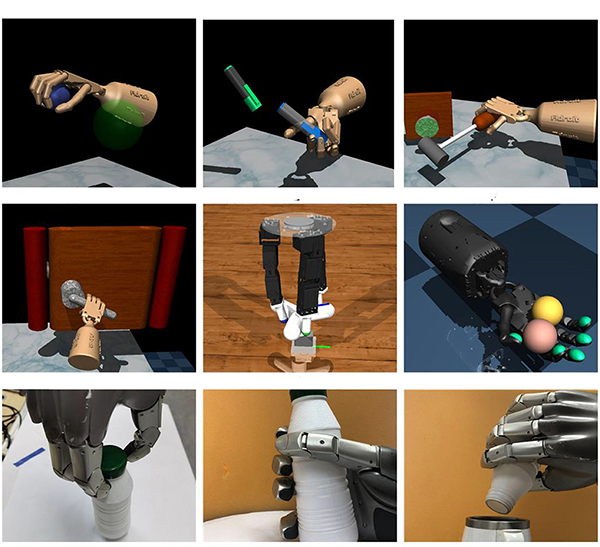
True dexterous manipulation requires robots to safely handle objects of different shapes, sizes, and materials while performing delicate tasks such as small component assembly without causing damage. This capability demands advanced tactile feedback systems that can provide real-time force and pressure sensing, enabling robots to adjust grip strength and manipulation strategies dynamically.
Research efforts focus on developing bio-inspired tactile sensors that can measure contact force, location, pressure distribution, and incipient slip with human-like sensitivity. Recent advances include magnetic field-based tactile sensing systems that can convert contact information directly into electrical signals, offering a novel approach to robotic touch perception. However, achieving the full spectrum of human dexterous manipulation—including the ability to generalize handling skills to previously unseen objects in real-time—remains unattained.
- Advanced Human-Robot Collaborative Intelligence
The evolution toward truly intelligent collaborative robots (cobots) represents a paradigm shift from current human-robot interaction models. While existing cobots can work alongside humans in structured environments, the next breakthrough involves developing robots with sophisticated understanding of human intentions, emotional states, and collaborative dynamics.
This revolutionary capability requires multimodal perception systems that combine computer vision, natural language processing, and haptic feedback to create seamless human-robot partnerships. Research demonstrates that effective collaboration depends on robots’ ability to predict human actions, adapt to varying workloads, and maintain optimal interaction fluency regardless of task complexity.
Current limitations include robots’ inability to understand contextual nuances of human communication and their lack of proactive collaboration capabilities. The breakthrough technology would enable robots to engage in natural dialogue, interpret non-verbal cues, and make autonomous decisions about when and how to assist human workers without explicit programming. Such systems would require ethical decision-making frameworks that allow robots to explain their reasoning and maintain predictable behavior patterns.
- Neuromorphic Computing for Real-Time Adaptive Learning
Neuromorphic computing represents a fundamental departure from traditional von Neumann architectures, offering energy-efficient, brain-inspired processing capabilities for robotic systems. This technology promises to enable robots with embodied intelligence that can adapt and learn in real-time while operating in dynamic manufacturing environments.
Unlike current systems that rely on pre-trained models, neuromorphic robots would employ spiking neural networks (SNNs) that process information in a bio-plausible manner, enabling continuous learning and adaptation. This approach offers significant advantages in energy efficiency and real-time processing, making it ideal for resource-constrained robotic systems.
The revolutionary potential lies in creating robots that can learn new tasks through observation, adapt to environmental changes without reprogramming, and develop specialized capabilities based on their operational experience. Current research focuses on developing effective learning rules, training mechanisms, and multi-modal sensing integration that would enable robots to achieve targeted learning quality while maintaining adaptability to changing conditions. However, the integration of neuromorphic hardware with conventional robotic systems and the development of principled frameworks for neural representation remain significant challenges.
- Quantum-Enhanced Swarm Intelligence
Quantum computing applications to swarm robotics represent an emerging frontier that could revolutionize collaborative manufacturing operations. This technology promises to enable networks of robots with quantum-entangled communication capabilities, offering exponential improvements in coordination efficiency and security against cyber attacks.
Current swarm robotics applications in manufacturing, such as Amazon’s warehouse automation and BMW’s assembly line coordination, demonstrate the potential for multiple robots working collaboratively. However, quantum-enhanced systems would enable unprecedented levels of coordination through quantum search algorithms that reduce computational complexity from O(n) for classical robots to O(√n) for quantum-enabled systems.
The revolutionary capability would manifest in manufacturing scenarios where hundreds of robots could coordinate instantaneously, optimizing production workflows, resource allocation, and quality control processes with quantum-enhanced decision-making.
Research indicates that quantum-based cooperation could improve collision avoidance, path planning, and collaborative task execution while providing inherent security through quantum entanglement properties. However, the practical implementation of quantum computing in mobile robotic platforms remains technologically challenging.
- Autonomous Learning from Demonstration with Multimodal Integration
The ability for robots to learn complex manufacturing tasks through observation and demonstration, similar to human apprenticeship models, represents a transformative capability for industrial automation. Current Learning from Demonstration (LfD) systems require extensive programming and structured environments, limiting their adaptability to new tasks and conditions.
The breakthrough technology would enable robots to observe human demonstrations, understand task objectives, and generalize these learnings to novel situations without explicit programming. This capability requires sophisticated multimodal perception systems that can integrate visual, auditory, and tactile information to build comprehensive task models.
Advanced implementations would combine computer vision with verbal descriptions, enabling robots to understand both physical demonstrations and human explanations of task requirements. Research demonstrates that multimodal approaches significantly improve object recognition and task understanding compared to single-modality systems. The revolutionary aspect lies in creating robots that can learn complex assembly procedures, quality control processes, and maintenance tasks simply by observing experienced human workers.
Current limitations include robots’ inability to understand contextual variations, adapt demonstrations to different environmental conditions, and transfer learning across different task domains. The unattained goal involves developing systems that can perform active exploration during learning, using model-based reinforcement learning to understand task dynamics and optimize performance through autonomous experimentation.
Implications for manufacturing
These five technological advances represent interconnected developments that would collectively transform industrial manufacturing. The integration of dexterous manipulation with collaborative intelligence would enable unprecedented flexibility in assembly operations. Neuromorphic computing would provide the real-time processing capabilities necessary for adaptive behavior, while quantum-enhanced swarm intelligence would coordinate complex multi-robot operations. Learning from demonstration would dramatically reduce programming costs and enable rapid adaptation to new products and processes.
The convergence of these technologies promises to create truly autonomous manufacturing systems capable of self-optimization, continuous learning, and seamless human collaboration. However, significant research challenges remain in system integration, safety protocols, and the development of robust hardware platforms capable of supporting these advanced capabilities.